The MIT Media Lab Camera Culture group, in collaboration with the Photon Intelligence Lab (Akshat Dave, Stony Brook) and the Multisensory Intelligence group (Paul Liang, MIT), presents the All-Photon Perception Challenge. Consumer LiDARs cost a few dollars and report only distance, yet each measures a full histogram of photon arrival times, including the faint multi-bounce light that reaches surfaces the beam never pointed at, even around a corner. The challenge gathers the sensors, data, and code to find how much of a scene the single-photon data from consumer LiDARs can reveal.
Bring a few-dollar single-photon LiDAR, capture your own scenes, and submit them; community captures are added to the datasets the benchmark tracks are evaluated on, in line of sight and around corners. Every result so far comes from one rig in one lab; this is how we change that. Contributors are credited, the strongest submissions win the Community Contribution track, and standout captures co-author the dataset release. The contribution toolkit is coming soon. Sign up for updates.
Dense, metric 3D from a single coarse 3×3 or 8×8 view, where each pixel integrates a wide field, in line of sight.
Perceive objects hidden around a corner from the multi-bounce histogram tail: position, size, identity, and tracking.
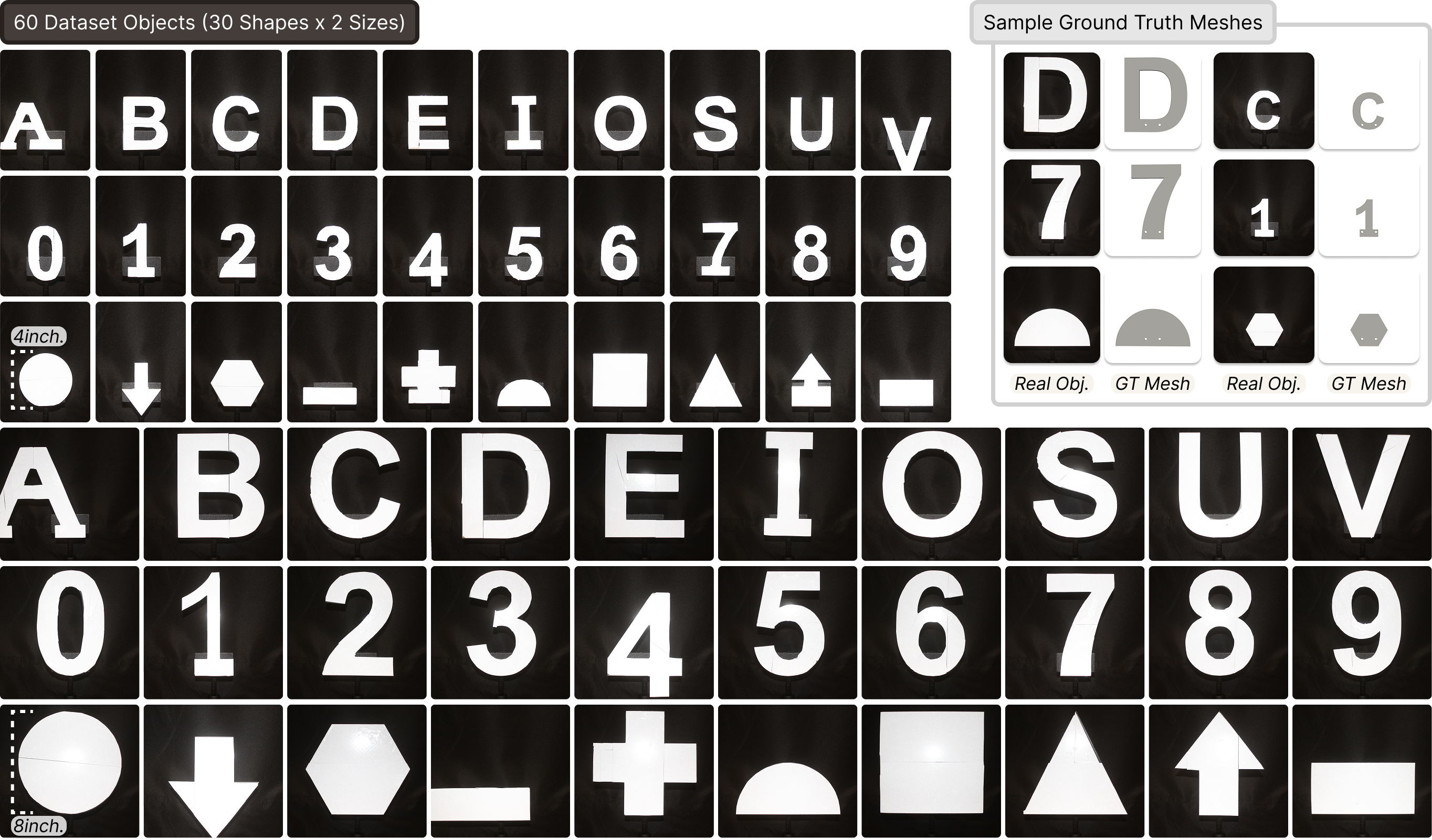
Open datasets, methods, and code to build on, for your own captures and for both tracks.


The toolkit is released; community contribution opens soon.
Test data, evaluation server, and leaderboard.
Winners recognized at a workshop and tutorial.
New tasks and datasets added through the year.
Community contribution is coming soon. Sign up for updates on it, and on when the benchmark tracks launch this fall.